
Multi-robot Human-in-the-loop Control under Spatiotemporal Specifications
Published in International Conference on Robotics and Automation (ICRA), 2024
PDF Open version Pictures BibtexRecommended citation:
Zhang Y., Nan Fernandez-Ayala V. and V. Dimarogonas D., "Multi-robot Human-in-the-loop Control under Spatiotemporal Specifications", International Conference on Robotics and Automation (ICRA), 2024.
Abstract
In this work, we present a coordination strategy tailored for scenarios involving multiple agents and tasks. We devise a range of tasks using signal temporal logic (STL), each earmarked for specific agents. These tasks are then imposed through control barrier function (CBF) constraints to ensure completion. To extend existing methodologies, our framework adeptly manages interactions among multiple agents. This extension is facilitated by leveraging nonlinear model predictive control (NMPC) to compute trajectories that avoid collisions. An integral aspect of our approach is the integration of a human-in-the-loop (HIL) model. This model enables real-time integration of human directives into the coordination process. A novel task allocation protocol is embedded within the frame-work to guide this process. We substantiate our methodology through a series of experiments, which corroborate the viability and relevance of our algorithms.
Media
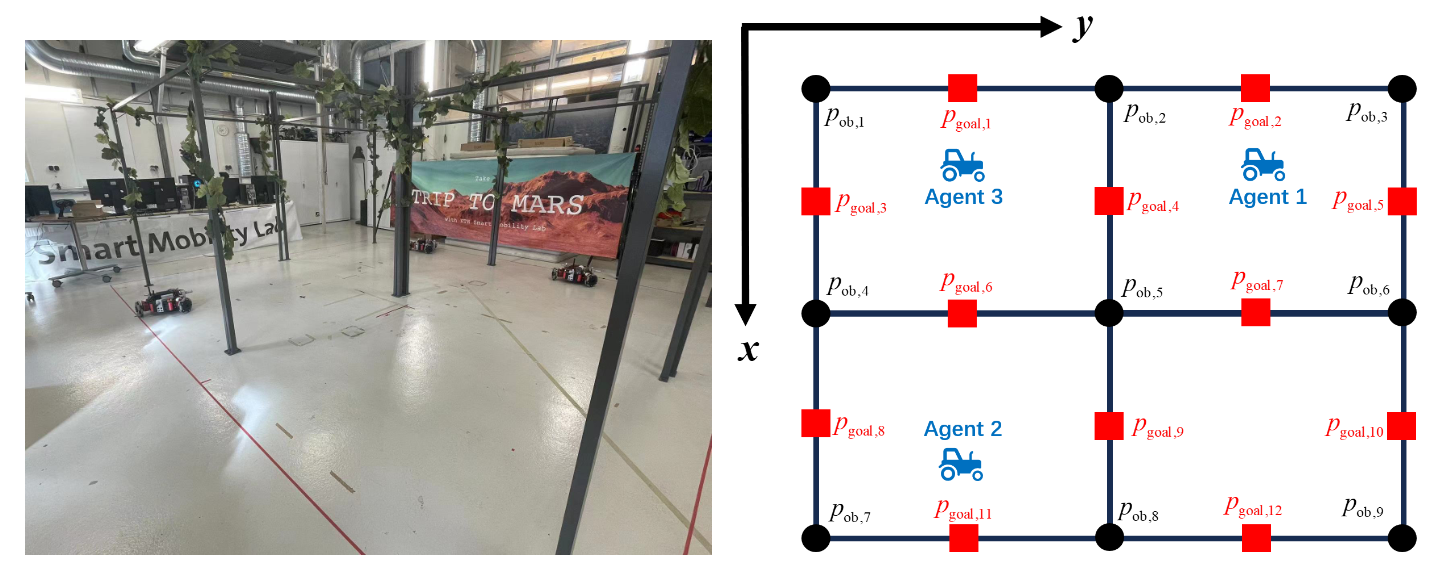
Picture of the experimental setup with robots and artificial vineyard.
BibTex
@inproceedings{ICRA24_MPC_STL,
author={Zhang, Yixiao and Fernandez-Ayala, Victor Nan and Dimarogonas, Dimos V.},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
title={Multi-robot Human-in-the-loop Control under Spatiotemporal Specifications},
year={2024},
volume={},
number={},
pages={4841-4847},
keywords={Protocols;Computational modeling;Robot kinematics;Human in the loop;Real-time systems;Trajectory;Spatiotemporal phenomena},
doi={10.1109/ICRA57147.2024.10610123}
}